静力水准仪适用于长期监测大坝、隧道边坡、路堤基坑、工民用建筑等工程的多点部位的沉降变形。静力水准仪由 2 套以上组成系统,各测点由通液管连通,磁浮子随液位同步上下,实时液位由磁致伸缩式传感器测出,通过计算可得出各测点的沉降量。


静力水准仪适用于长期监测大坝、隧道边坡、路堤基坑、工民用建筑等工程的多点部位的沉降变形。静力水准仪由 2 套以上组成系统,各测点由通液管连通,磁浮子随液位同步上下,实时液位由磁致伸缩式传感器测出,通过计算可得出各测点的沉降量。
表面测缝计适用于长期布设在混凝土结构体或其它材料结构体内及表面,测量结构体伸缩缝或周边缝的开合度(位移),同步测量埋设点的温度。
表面测缝计的传感器采用的是 VWD 型振弦式位移计,由其加装配套附件而组成,振弦式位移计全不锈钢结构、一体化设计、防旋转、防折弯、抗冲击、抗跌落、安装方便可靠,长期工作在水下。
表面测缝计测量系统智能识别信息、智能故障诊断、云平台手机无缝对接。
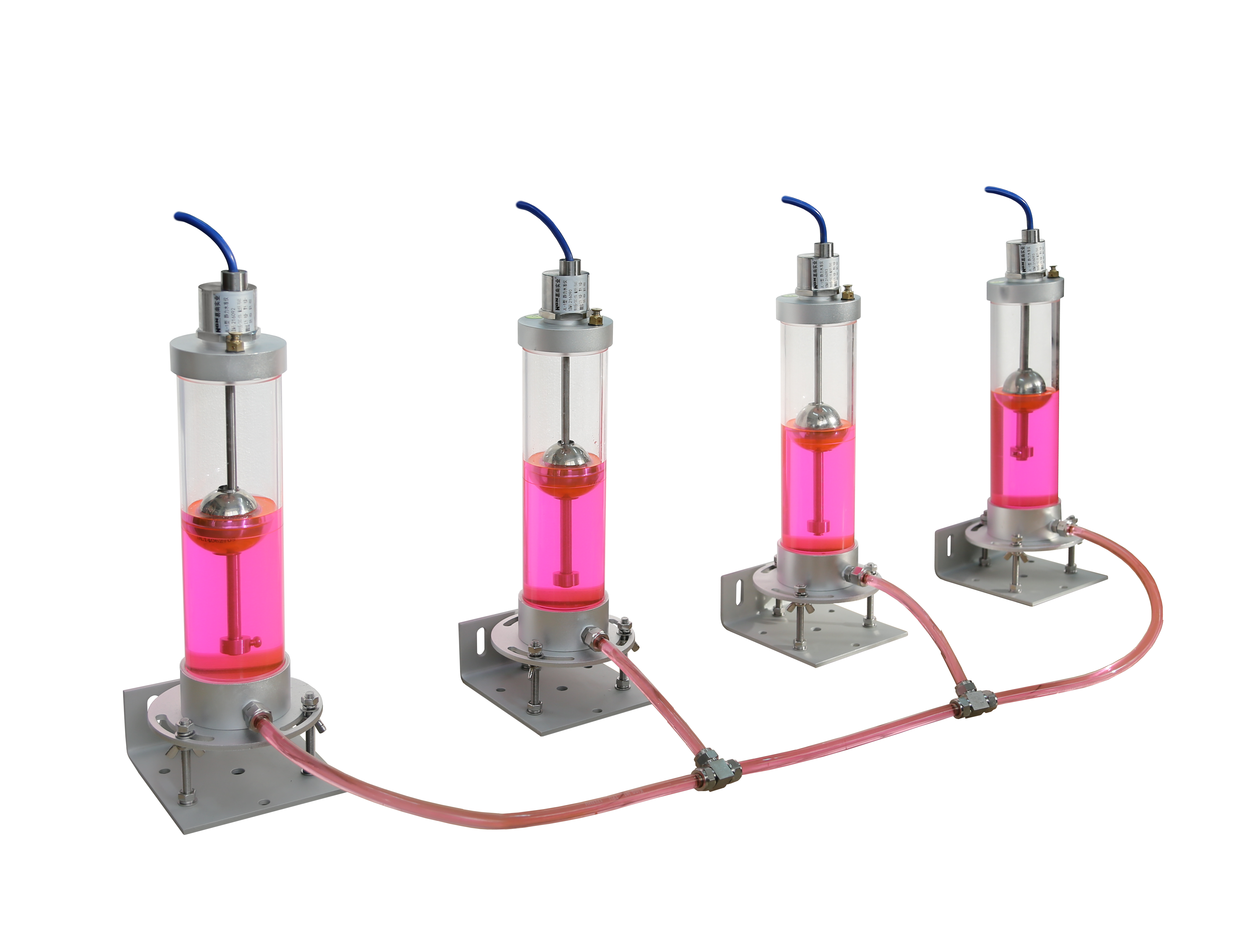
结构
静力水准仪由液位传感器、储液罐、水平调节螺栓、安装架、通液管、连通接头、汽车玻璃水(优质-25℃小桶装)、观测电缆等组成(见下图)。
工作原理
静力水准仪由测杆、电子仓和套在测杆上的非接触磁浮球等组成,测量电路发出起始脉冲,起始脉冲在波导管中传输,脉冲与磁浮球相遇,产生返回脉冲,电子拾能机构感知返回脉冲,测量两个脉冲之间的时间差,精确计算测出液位值。
基准点沉降
静力水准仪基准点的沉降变化量△Hj 与测量值 F 为线性关系,计算公式如下:
△Hj = Kj*(Fj - F0j)
式中:△Hj—基准点被测液位变化量,单位为mm;
Kj—静力水准仪基准点的灵敏度系数;
Fj—静力水准仪基准点的实时测量值,单位为mm;
Foj—静力水准仪基准点的基准值,单位为mm。
测量点沉降
静力水准仪测量点沉降变化量△Hx 与测量值 F 为线性关系,计算公式如下:
△Hx = Kx*(Fx - Fox)
式中:△Hx—测量点被测液位变化量,单位为mm;
Kx—静力水准仪测量点的传感器系数;
Fx—静力水准仪测量点的实时测量值,单位为mm;
Fox—静力水准仪测量点的基准值,单位为mm
系统沉降
各测量点相对基准点的沉降变化量△H 与测量值 F 为线性关系,计算公式如下:
△H = △Hx - △Hj
△H = Kx*(Fx - Fox) - Kj*(Fj - Foj)
注:△H 为正值时表示沉降,△H 为负值时表示抬升(隆起),静力水准仪输出信号为RS485 数字量,现场测量不需要计算。
| 规格型号 | DSM-LEV |
|---|---|
| 测量范围 | 0~200mm(量程自选) |
| 灵敏度 | 0.01mm |
| 测量精度 | 0.1%F.S |
| 测温范围 | -40℃~+80℃ |
| 灵敏度 | ±0.1℃ |
| 温度修正 | 自动补偿 |
| 输出信号 | RS485 |
| 仪器外径 | 90mm |
| 仪器高度 | 300mm |
| 防水等级 | IP67 |
| 仪器材料 | 铝合金 |
| 绝缘电阻 | 50M Ω |
注:频率模数 F=Hz2 ×10-3